顏家鈺 Jia-Yush Yen

國立臺灣科技大學機械工程系講座教授
學歷
- 美國加州大學柏克萊分校機械系系統控制博士(1988)
- 美國明尼蘇達大學機械系熱流碩士(1983)
- 國立清華大學動力機械學系學士(1980)
經歷
- 國立臺灣科技大學機械工程系講座教授暨校長(2021/2~迄今)
- 國立臺灣大學機械工程學系暨研究所教授(1997/8~2021/1)
- 國立臺灣大學工學院院長(2011/8~2017/6)
個人勵志銘
所有的人都是在困難中一步一步地踏出來的。堅持我們的信心,神必會帶領我們的前路。
精密運動控制之應用與進展
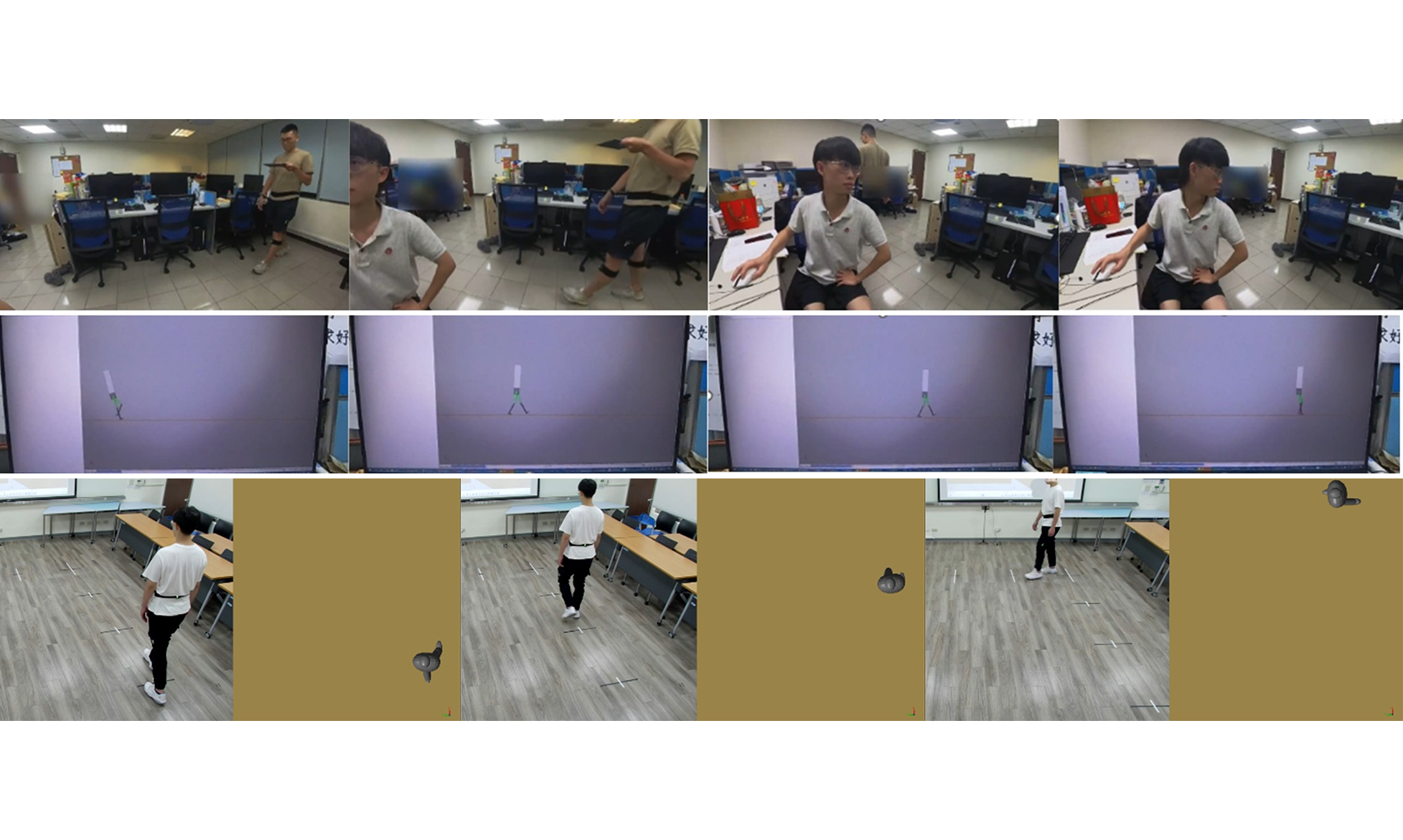
我的研究生涯一直以精密定位為主要的研究領域,見證了從初代磁碟機控制精度 1 μm,到現在後 2 nm半導體製程達到次奈米精度,也見證了其中牽涉的軟體、硬體的創新與進步。軟體方面從以往只有固定的線性控制器架構藉調機疊代來達成所需要的性能,到以線性矩陣不等式為基礎的最佳化。硬體方面從以前數位控制只有 1 KHz、8 bits 的輸出,到現在動輒 10 KHz、16 – 24 bits 的輸出,驅動器的響應也從以往針對硬碟驅動器只有幾克的質量也只能達到百赫茲的頻寬,到今天可能是數十公斤的設備也要達到上百赫茲的頻寬,工程規格也從最終定位進展到運動過程中的瞬時都有其定位規範。而今日計算速度的演進可即時進行複雜的預測控制,精密的軟體模型能力,已經不限是否線性,只藉建立一個性能指標就有可直接進行各式的最佳化,技術重點反而是如何建立合適的指標來適切反映我們對系統各項性能的要求。我與醫師們的合作機會,也讓我能從事手術機器人的研究,強大的運算能力配合軟性機器人的操作容許在微創機器人的運動中加入多個瞬時運動中心,來維持病患切口。也能即時進行雙足機器人的數位孿生,此雙足孿生可以即時摹擬本人的所有動作如行走(圖一)和轉彎(圖二),此雙足孿生機器人維持平衡的所有資訊就可以提供運動輔助、復健醫學甚至外骨骼的控制基礎。我也了解到,需要長時間經驗的累積才能在一個領域建立深入的競爭力與研究眼光。
得獎感言
我能夠有機會花這麼長的時間浸淫於精密伺服系統的研究,需要感謝教育部、國家科學及技術委員會多年的研究經費支持,讓我得以累積這許多的經驗,也感謝跟我合作的教授、醫師們,感謝台積電、上銀、新代、致茂等合作公司,因為這些公司對於精密伺服控制器性能的需求以及向大銀微所發展的高響應驅動器,讓我不斷地在新的挑戰下成長,吸收新的資訊,衍化成研究技術。也要感謝寶元、達明在機器人系統的協助。當然還是要謝謝這麼多年來跟我一起努力的學生和團隊,他們不斷的努力與支持,對於我的想法的容忍與長時間在實驗室的努力,讓我們能得到今日各界的認同。
![]() Copyright 2026 © National Science and Technology Council 國科會
版權所有
Copyright 2026 © National Science and Technology Council 國科會
版權所有