郭秉寰 Ping-Huan Kuo

國立中正大學機械工程學系副教授
學歷
- 國立成功大學電機工程博士(2015)
- 國立成功大學電機工程碩士(2010)
- 國立成功大學電機工程學士(2008)
經歷
- 國立中正大學前瞻製造系統頂尖研究中心行政業務組組長(2023/8~迄今)
- 國立中正大學機械工程學系副教授(2022/8~迄今)
- 國立屏東大學智慧機器人學系副教授(2020/8~2021/1)
個人勵志銘
努力踏實,莫忘初衷。
開發智慧型演算法 提升智慧製造生產效率
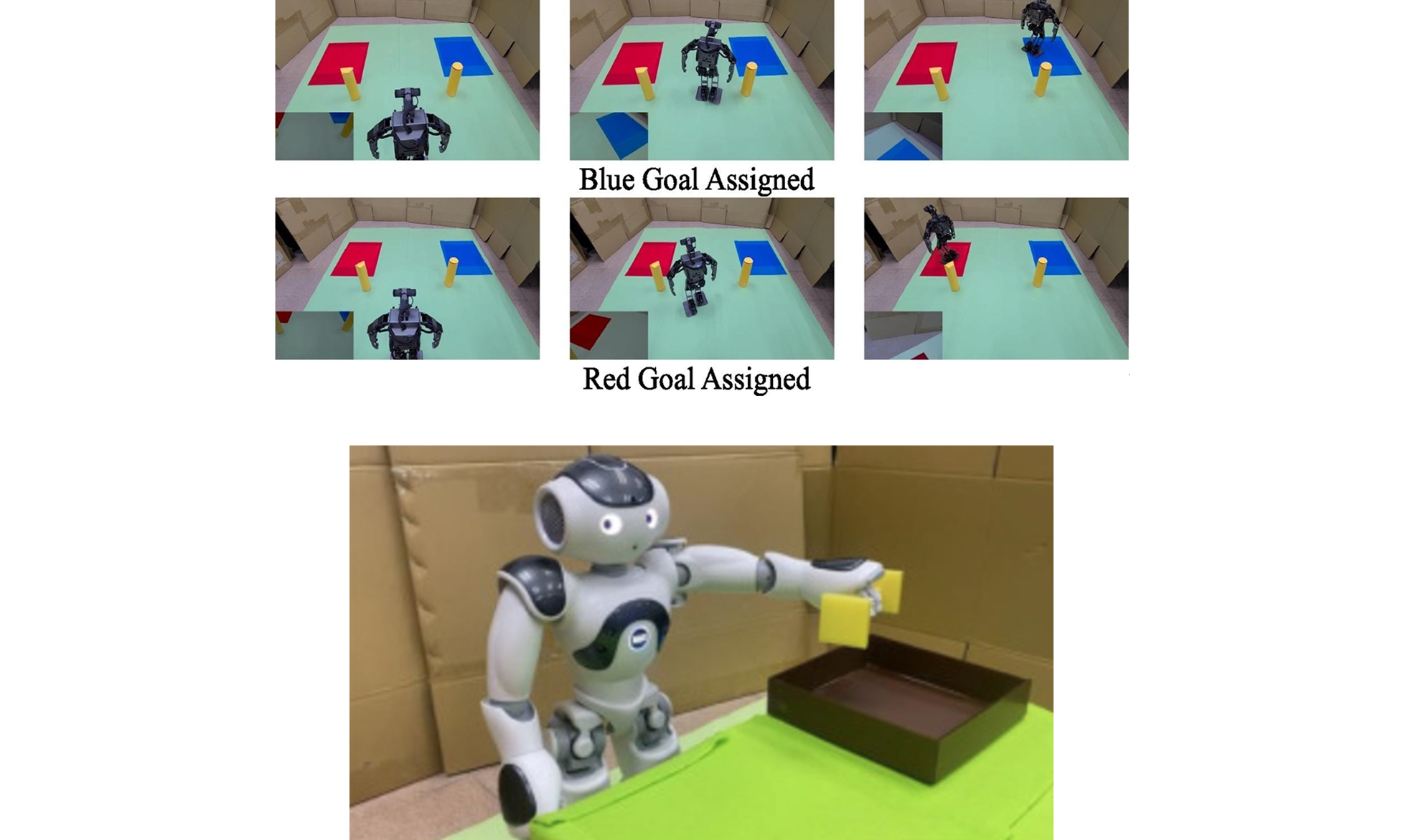
本研究團隊於智慧型機器人方面,近年提出了以深度強化學習模型為基礎之步態控制器,並將其應用於人形機器人之中。該研究可使人形機器人能夠進行自主學習,並自行嘗試規劃其關節角度轉動過程,進而使其能夠在多次自我學習過程中,獲得最佳學習經驗。而該研究之實驗結果顯示,在結合小波轉換與DDPG的學習方法下,人形機器人即使在斜坡上行走,亦能有良好的學習成果。此外,本團隊亦將機器人視覺系統整合於PPO模型之中,並讓機器人自主學習各項決策。實驗過程中,機器人僅依靠未經任何處理之視覺影像,便能進行行走路徑規劃,其效能在實驗中有良好的驗證。而在機器人物件抓取方面,本團隊亦提出以PPO為基礎之兩階段物件抓取學習演算法。該研究之設計概念十分新穎,並成功讓機器人透過自主學習,成功抓取物品。此外,本團隊亦投入工具機智慧檢測系統之研究,並進行工具機各項預測系統之開發。
其中本團隊設計神經網路刀具磨耗預測系統,實驗結果顯示,相較於其他模型,此研究所提出之模型具有更好的預測效能。此外,本人亦開發以機器學習為基礎之工具機顫振檢測模型。在加工過程中,本團隊將加速度計連接至工具機來獲取振動數據,並根據振動數據判斷是否已有顫振情形發生。而在加工過程中,主軸之熱伸長量也是極需考量之因素。本人亦將智慧型演算法結合至該課題,並針對伸長量進行預測,進而提供補償之依據,提升加工精度。上述研究,對於機器人與加工製造產業之智慧化發展,皆具影響力。
得獎感言
感謝國家科學及技術委員會與控制學門評審委員的支持與提攜,亦感謝國立中正大學及我過去曾經任教過之國立屏東大學,給予優良的研究環境與經費支持,讓我有良好的資源,得以為學術研究貢獻己力。特別感謝我的恩師-李祖聖教授,從大學、碩士與博士一路以來的悉心指導,乃至在踏入學術研究路上之栽培與照顧,皆給予無微不至的關懷與支持。由衷地感謝我最親愛的家人,自我出生以來一路的照顧與支持,無論是在求學過程中的困難時刻,還是在面臨人生抉擇的關鍵時期,始終給予我無盡的愛與關懷。最後,感謝我的女友,以及所有在人生路上給予幫助、鼓勵與支持的朋友與同仁,因有你們的陪伴,我才能在學術研究以及人生的道路上勇往直前,不斷精進與成長。
![]() Copyright 2025 © National Science and Technology Council 國科會
版權所有
Copyright 2025 © National Science and Technology Council 國科會
版權所有