郭重顯 Chung-Hsien Kuo

國立臺灣大學機械工程學系暨研究所教授
學歷
- 國立臺灣大學機械工程博士(1999)
- 國立臺灣大學機械工程碩士(1995)
- 國立中興大學機械工程學士(1990)
經歷
- 國立臺灣大學機械工程學系暨研究所教授(2021/8~迄今)
- 國立臺灣科技大學電機系教授(2012/8~2021/7)
- 長庚大學副教授(2005/8~2007/7)
個人勵志銘
樂在研究~
珍惜失敗獲得的經驗和成長,享受成功帶來的喜悅和成就。
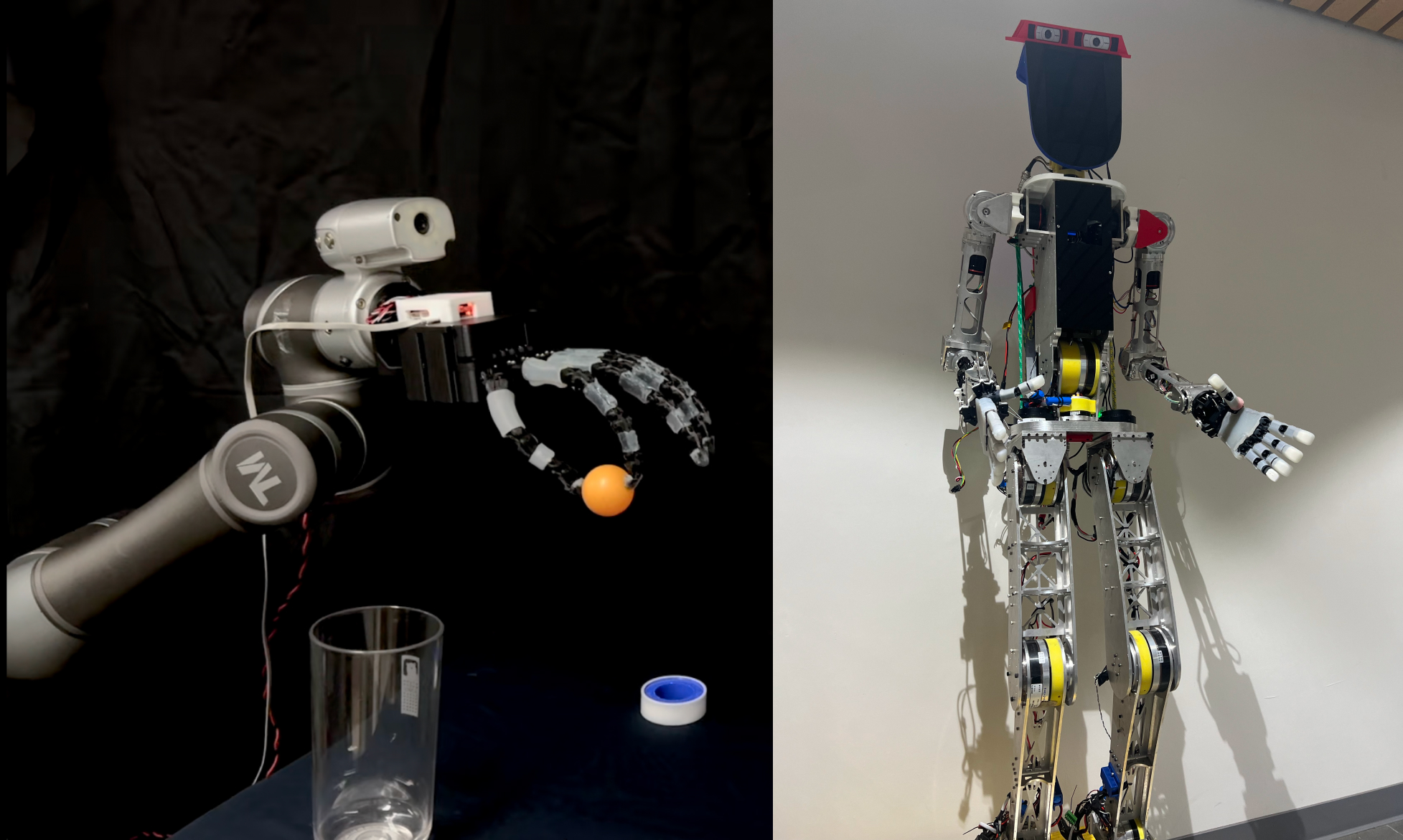
仿生雙足人形機器人與機器狗研發及技術應用
我的研究團隊長期投入雙足人形機器人開發已經超過20年。我也經常帶領團隊出國參加國際競賽,讓學生有機會和國際知名團隊交流並一較高下。我們在國家科學及技術委員會2006-2009年及2011-2017年這九年的補助下,研發出46公分-149公分雙足人形機器人,並參加全球相當有挑戰性之RoboCup雙足人形機器人聯盟競賽。很榮幸2013-2015年連續3年獲得該聯盟技術挑戰賽冠軍,同時在2013-2017年連續5年獲得該聯盟足球賽亞軍。在此一雙足人形機器人機電設計以及步態平衡控制基礎上,我們從2023年11月起,在國科會補助下投入四足機器狗研發,7個月內,不透過國外Open Source,自行研發、設計、製造出兩部AI機器狗(54公分/16公斤Oliver寵物機器狗及93公分/40公斤Dustin工作機器狗),且自行研發步態穩定控制相關演算法。此一成果也於2024年5月29日以「臺灣自主研發AI機器狗首次發表」主題,在國科會舉辦記者會,吸引多家媒體到場採訪及報導。
由於人形機器人與機器狗在「多關節馬達控制」以及「步態平衡控制」等議題上具備高挑戰性,因此我也將這些技術能量與成果進而延伸出不同機器人研究主題,包括:自行研發6人座無人駕駛電動廂型車、自主移動輪式機器人、柔性軟式機器手臂(連續體機械臂/同心管機器人)、五指靈巧手、六軸工業型機器手臂(5公斤/20公斤酬載能力)、類人雙手臂機器人、無人撲翼機(鳥機器)、外骨骼復健機器人、腦波控制輪椅/雙足人形機器人等研究。
得獎感言
我於1990年大學畢業,1992年6月退伍後即進入安峰鋼鐵公司服務,為想更進一步學習熱軋鋼捲設備控制方法,於1993年2月離職並參加3月的碩士入學考試。1993年9月進入臺大機械系控制組就讀,並遇到我的恩師黃漢邦教授,在1993-1999年共六年碩士和博士期間,黃老師教我嚴謹研究態度以及紮實研究訓練。畢業後,任教過東南工專、長庚大學、臺科大,我珍惜每一階段之學習與成長,特別是臺科大期間擔任工業4.0中心主任,奠定我在研究團隊養成能力。到臺大任教後,感謝系上師長協助,也謝謝研究生和團隊的努力,讓我的研究有更大的突破。
謝謝父母親栽培,也謝謝內人把小孩教養得很好,讓我無後顧之憂投入研究;也要感謝共事過的師長、學門先進幫忙。最後謝謝審查委員肯定以及國科會長期研究經費補助。
![]() Copyright 2025 © National Science and Technology Council 國科會
版權所有
Copyright 2025 © National Science and Technology Council 國科會
版權所有