黃國勝 Kao-Shing Hwang
國立中山大學電機工程學系特聘教授

學歷
- 美國西北大學計算機工程博士 (1993)
- 美國西北大學電腦整合製造碩士 (1989)
- 國立成功大學工業設計學士 (1981)
經歷
- 國立中山大學電機工程學系教授 (2011/8 ~迄今)
- 美國紐約州立大學石溪分校客座教授 (2009/8 ~ 2010/2)
- 國立中正大學電機工程學系教授 (2001/8 ~ 2011/7)
研發智慧機器人 推動強化學習技術的產業應用
本人從研讀博士學位起,即投入機器手臂之順服控制的研發,並實作在人工關節的置換手術系統,回國後也一直著力於「工業機器人操控系統」、「群組合作機器人系統」、以及「強化學習理論」等領域。相關研究成果皆已陸續發表於 IEEE Trans. 等國際知名刊物,近五年期間也發表 40 篇論文,其中 22 篇均在排名 Q1 內,一篇被 ESI 連續 2 年列為高被引論文。
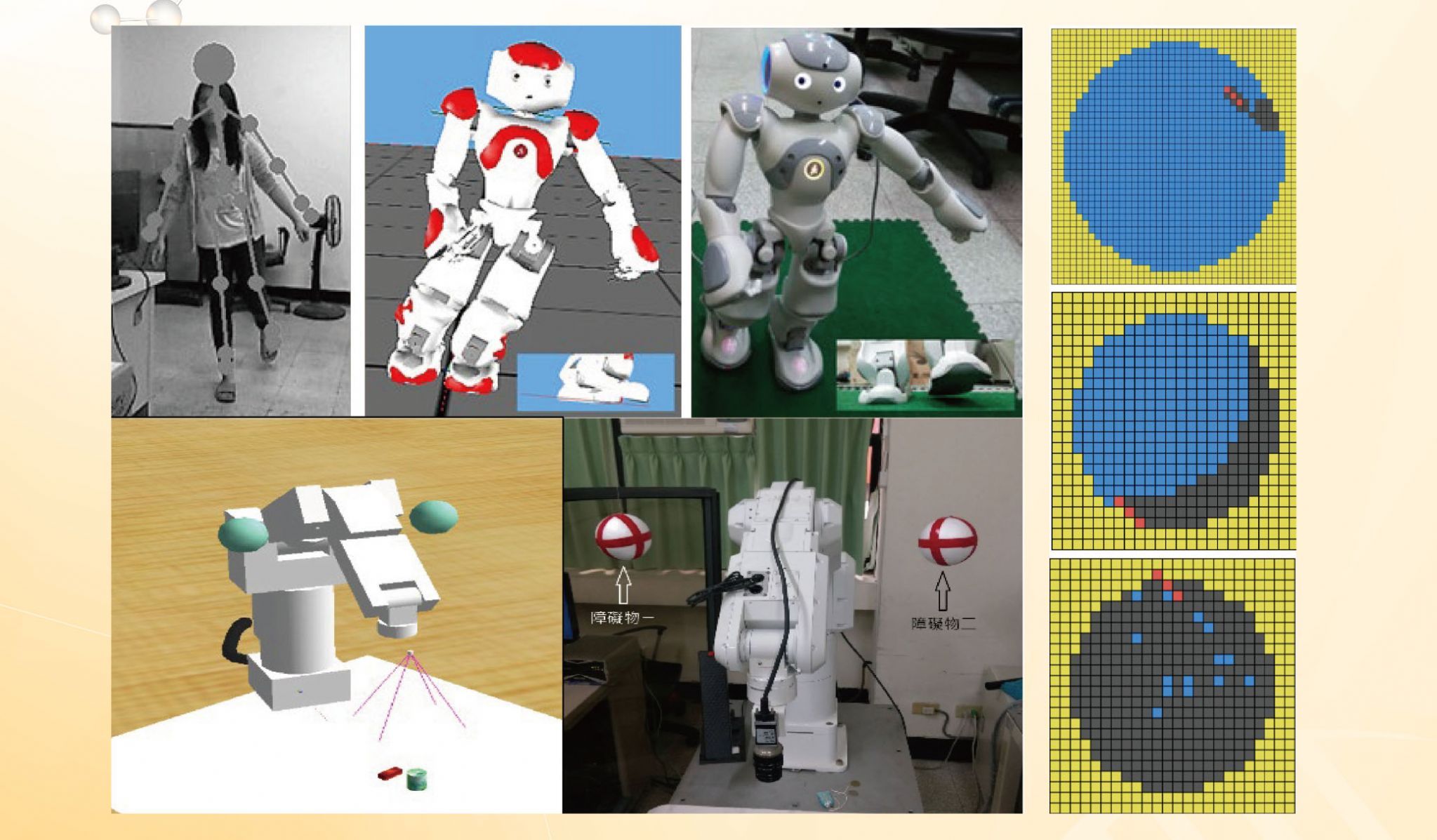
研究成果應用在產業實務的問題解決,則可略分為兩大面向:機器人操控系統設計及路徑規劃,以及多機器人派工系統。
機器人操控系統設計及路徑規劃方面,人機共作的輕型機器人手臂,已逐漸成為智慧製造及智慧生活的主流,而七軸以上手臂的運動學,卻是國內業界亟需跨越的技術門檻。本人於此方面的研究成果己技術移轉至研發法人機構及相關業者,協助解決具冗餘軸之雙手臂避撞問題。
多機器人派工系統方面,行動機器人最近也是國內新興的熱門產業,但大部分業者皆侷限於本體的製造,上層的多機器人派工系統研究尚付之闕如,本研究團隊以在機器人群組合作、自主學習、及行為融合等所發展的強化學習技術,應用至 IC 封裝工廠無人搬運車系統的載具定位與導引,架構具自主導航無軌式無人搬運車的技術,解決目前無人搬運車系統僅能單次單運量的問題,完成自主搬運之能力。研發團隊也以所研發的強化學習技術完成多機器人指派系統,可提高運載量、縮短單次運載所需時間,達成提升效能與成本效益。
得獎感言
感謝控制學門的先進一直以來給予本人的鼓勵及提攜,更感謝中山大學提供資源充沛的研究及教學環境。感謝日月光集團頒予本人「日月光集團講座」的榮譽肯定,更激勵我在產學合作的熱情與熱誠。同時也謝謝中正大學,讓本人甫一歸國就擁有優質的教學、研究資源,以及溫馨的同儕環境,從事學術領域自始即有穩固的基石。
個人勵志銘
「粗繒大布裹生涯,腹有詩書氣自華」,人生最大的幸福是能把工作做得興趣盎然,仕事怡然自得。
- 基礎研究超前部署
- 豐沛國家科研人才

